Ứng dụng của romAI trong việc dự đoán ứng suất và tải trọng từ mức độ biến dạng
Giới thiệu:
Digital Twin là mô hình vi tính hoá của một vật thể hoặc một hệ thống bao hàm toàn bộ vòng đời của nó. Nó tận dụng dữ liệu thời gian thực để liên tục cập nhật, tích hợp mô phỏng, máy học, và các thuật toán để hỗ trợ cho quá trình đưa ra quyết định. Các cảm biến được sử dụng trên các vật thể vật lý để thu thập thông tin dựa trên các thang đo hiệu suất chủ chốt như độ biến dạng, nhiệt độ, v.v... Các dữ liệu được sử dụng để cập nhật thay đổi các mô hình vi tính hoá, và các mô hình này sau sẽ được dùng để chạy mô phỏng. Quá trình mô phỏng được dùng để phát hiện lỗi khi hoạt động, đưa ra điều chỉnh, và cải tiến các vật thể vật lý. Nếu quá trình mô phỏng được ứng dụng rộng rãi trong giai đoạn thiết kế, thì bộ song sinh kỹ thuật số (Digital Twin) lại trở nên cực kì hữu ích khi ta nắm được các dữ liệu thời gian thực.
Do đó, điều này khiến cho câu hỏi: “Làm thế nào để có thể đồng thời ứng dụng cả mô phỏng, bản sao kỹ thuật số, và dữ liệu thời gian thực để có được cái nhìn sâu vào một vấn đề thực tế?” trở nên liên quan. Bài viết này sẽ đi vào việc cung cấp một ví dụ rất đơn giản của một cái thanh đỡ ứng dụng mô phỏng phần tử hữu hạn (FEA) trong Phần mềm Altair OptiStruct, romAI của Activate, và “dữ liệu thử nghiệm mô phỏng” để dự đoán ứng suất và tải trọng dựa trên vùng biến dạng.
Bài toán mô phỏng trong Phần mềm Altair OptiStruct
Cho một cấu trúc có thể chạy được FEA. Điều này tạo nên một mô hình mô phỏng. Ứng suất và biến dạng có thể được đánh giá trên mô hình này; nói một cách đơn giản, ứng suất và biến dạng tại các vị trí khác nhau có thể được tính toán cho bất kỳ tải trọng nào tác dụng lên kết cấu. Bây giờ, giả sử, một trường biến dạng hoàn toàn mới được cung cấp – ví dụ: trường biến dạng từ phép đo trên bộ phận vật lý. Chỉ bắt đầu từ thông tin về biến dạng ở 2 vị trí:
Có thể dùng romAI để dự đoán ứng suất trong thanh đỡ không?
Có thể dùng romAI để dự đoán tải trọng tạo nên 2 biến dạng nêu trên không?
Mô hình romAI cùng với mô hình FE, tạo thành bộ song sinh kỹ thuật số của thanh đỡ. Mô hình romAI sử dụng mô phỏng để xây dựng “Mô hình thứ tự rút gọn (ROM)” theo thời gian thực của thanh đỡ; sau đó nó nhận đầu vào từ các phép đo, từ đó dự đoán ứng suất, và tải trọng gây ra biến dạng này.
Thanh đỡ:
Mô hình thanh đỡ được lấy tại đây. Nó được sử dụng để mô tả phương pháp được nêu trong phần trước.
Phương pháp luận:
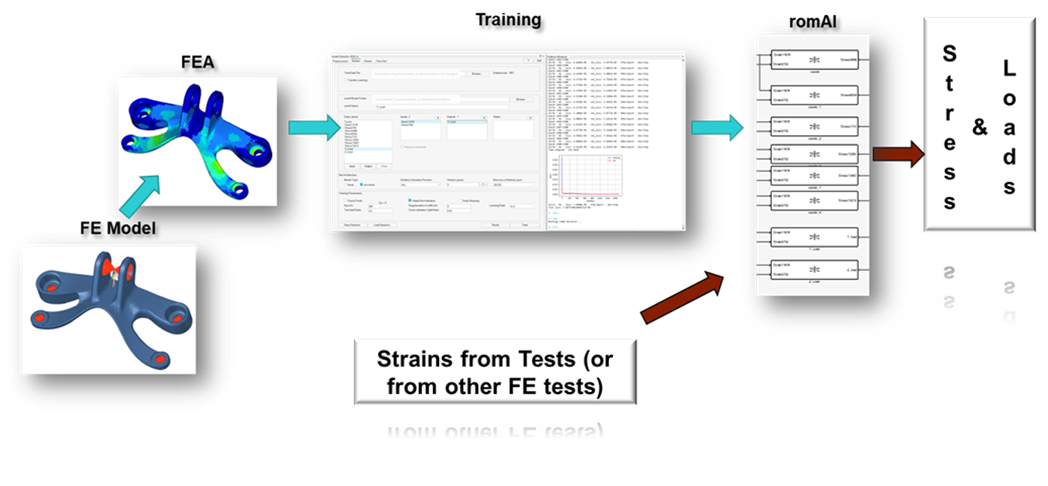 Hình 2: Phương pháp luận
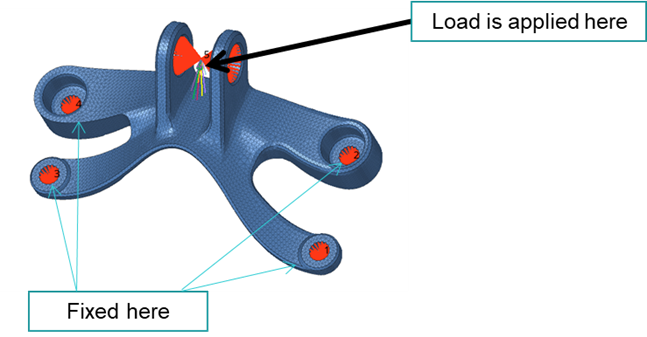
Hình 2: Phương pháp luậnMột mô hình FE của thanh đỡ được chuẩn bị. Đặc tính vật liệu phù hợp, tải trọng, điều kiện biên, và đầu ra được xác định.
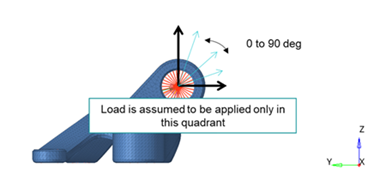
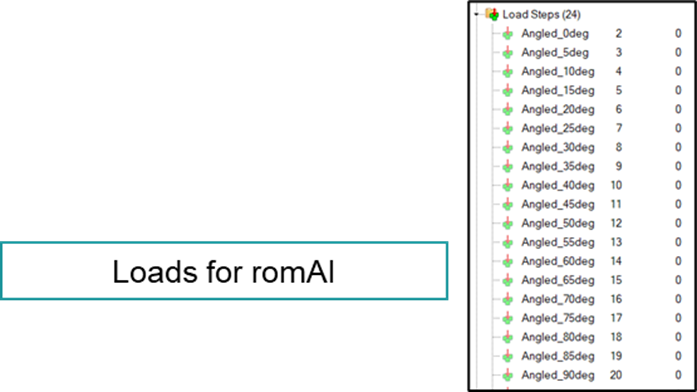
Để xây dựng ROM, ta cần phải tính toán các biến dạng và ứng suất cho các tải trọng đã biết. Các tải được giả định chỉ hoạt động trong một góc phần tư như hình bên dưới. Vấn đề còn lại chỉ là mở rộng các tải trọng khác nếu vấn đề này cần được mở rộng sang các góc phần tư khác.
Cần phải lưu ý rằng chỉ có một mô phỏng duy nhất chứa nhiều bước tải. Phân tích tĩnh được sử dụng để mô phỏng ứng suất và biến dạng cho các tải trọng cho trước.
ROM của thanh đỡ sau đó được xây dựng sử dụng romAI trong Activate:
Đầu vào: biến dạng vonMises ở các vị trí có thể tiếp cận được (2 vị trí)
Đầu ra: ứng suất vonMises ở các vị trí trọng yếu khác nhau (6 vị trí); các tải ở điểm gắn (2 tải: theo hướng Y và Z)
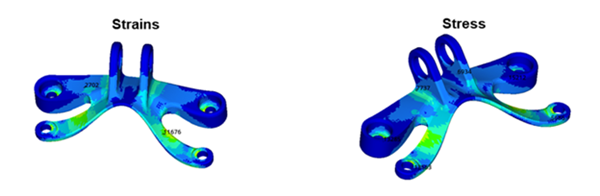
Hình 6: Vị trí các ứng suất và biến dạng được thu thập từ các thế hệ ROM.
Đối với mỗi đầu ra, một ROM riêng được tạo trong romAI.
Các ROM đã tạo (chứa trong khối FMU) được kiểm tra trong Activate, nơi các giá trị biến dạng mới (ở 2 vị trí đã xác định) được thêm vào như một đầu vào để thu được các giá trị ứng suất tại 6 vị trí và tải trọng theo hướng Y và Z.
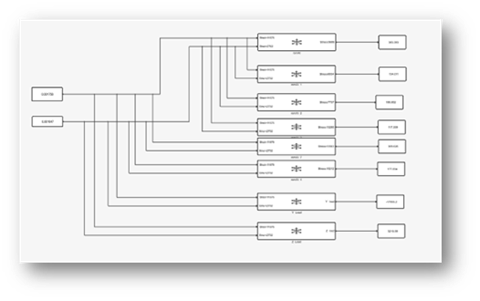
Hình 7: Các khối FMU dùng cho ứng suất tại mỗi vị trí, và tải (theo hướng Y và Z)
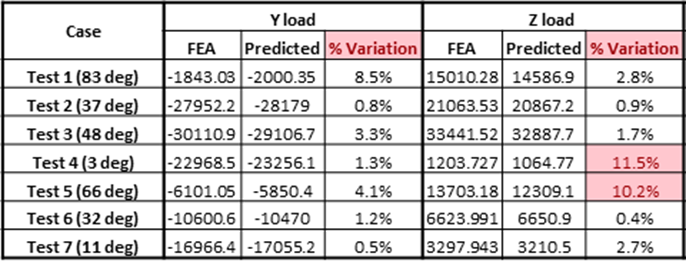
Để xác minh rằng mô hình romAI là chính xác, ta sử dụng “bộ dữ liệu thử nghiệm mô phỏng”. Điều này được thực hiện vì ta không có sẵn dữ liệu thử nghiệm. Ta thu thập được một trường biến dạng mới bằng cách chạy mô hình FE với các giá trị tải trọng ngẫu nhiên. Sau đó, ta thu được các biến dạng từ đây và nhập nó vào mô hình romAI để thu được các ứng suất. Các giá trị ứng suất này từ romAI được so sánh với các ứng suất từ FEA trong Phần mềm Altair OptiStruct. Bảng dưới đây cho thấy sự so sánh các kết quả. Các giá trị lỗi lớn hơn 10% được tô màu đỏ.

Các hạn chế đã biết:
Giả định rằng mô hình FE là bản sao máy tính chính xác của thanh đỡ. Để đạt được mục đích này, đối với mọi trường hợp như vậy, điều cực kỳ quan trọng là phải đảm bảo rằng mô hình FE được xây dựng chính xác và được thử nghiệm lên nhiều trường hợp tải trọng. Độ chính xác của mô hình romAI hoàn toàn phụ thuộc vào điều này.
Chỉ phân tích tĩnh được sử dụng trong quá trình mô phỏng này; những động thái phi tuyến tính sẽ phụ thuộc vào tải, và đường dẫn tải. Vì vậy, mô hình phi tuyến tính sẽ cần một chiến lược khác.
Kết luận:
Một mô hình romAI có thể dự đoán ứng suất và tải trọng trên một bộ phận với độ chính xác khá ổn chỉ với thông tin về các biến dạng tại 2 vị trí. Giờ đây, nó có thể được khai thác và sử dụng trong thời gian thực để xử lý dữ liệu cảm biến trong một bộ song sinh kỹ thuật số.
Quy trình này có thể được mở rộng ra tới các cấu trúc và nguyên lý phức tạp hơn:
Xác định số lượng máy đo biến dạng trên một thành phần để mô tả đầy đủ cấu trúc.
Nó có thể được mở rộng để xác định tải trọng tại các vị trí của bu lông với các biến dạng cho trước tại một số vị trí trong cấu trúc.
Bạn cần tư vấn?
Liên hệ ngay để PCB GraphTech hỗ trợ bạn nhanh nhất!
